宇宙分野・人工衛星の姿勢制御で高まるIMUの価値
一般的な人工衛星用途におけるIMUの要件とその理由
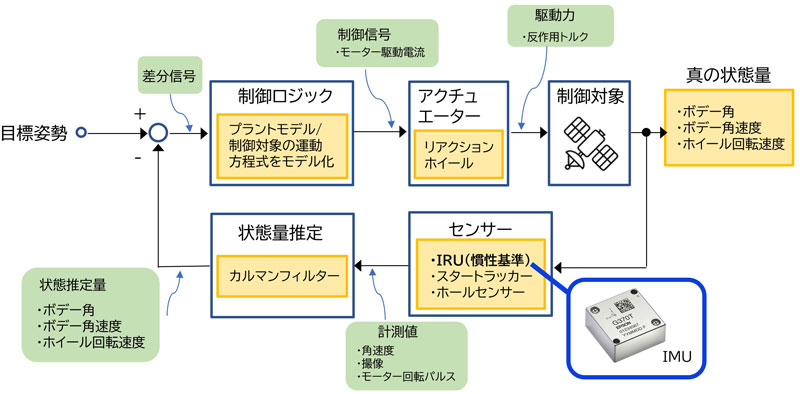
人工衛星の姿勢制御では、目標姿勢からのズレを検出し、リアクションホイールなどで補正し続けるフィードバック制御が行われます。
IMUは、人工衛星の姿勢を安定かつ高精度に保つための主要センサーのひとつであり、衛星の回転(角速度)を高頻度に計測して、状態推定の基礎データを提供します。
人工衛星に求められる慣性センサーの要件
- 低ノイズ: 人工衛星の姿勢誤差を抑えるため
- 高いゼロ点精度:人工衛星の姿勢誤差を抑えるため
- 小型・軽量:人工衛星軽量化につながり、打ち上げコスト減のため
- 低消費電力:人工衛星の多機能化により電力が逼迫する中、消費電力を抑えるため
- 放射線耐性:宇宙空間では放射線環境にさらされるため、故障や誤動作を防ぐ必要があるため
エプソンIMUの特徴
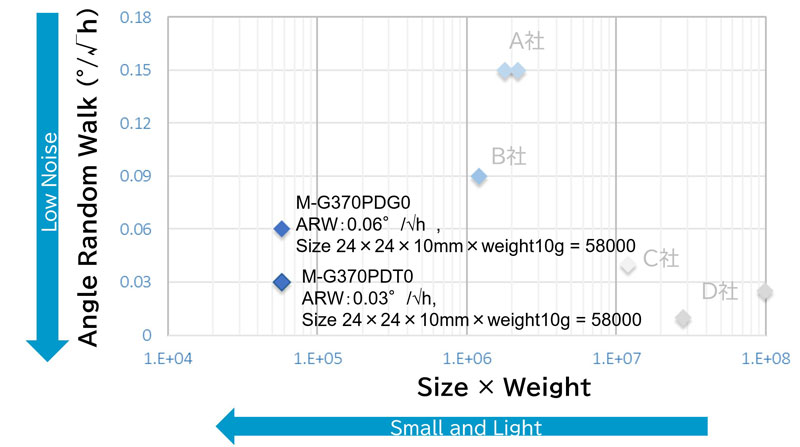
1. 高性能・小型・軽量
小型衛星では、限られたスペースと重量の中で高い姿勢安定性が求められます。
エプソンのIMUは小型・軽量でありながら、姿勢推定に重要な指標である角度ランダムウォーク(ARW) を低く抑え、衛星システムの高性能化に貢献します。
- 低ノイズ:角度ランダムウォーク(ARW) 0.03°/√h
- 高いゼロ点精度:初期バイアス誤差 360 dph(ジャイロセンサー)、2 mG(加速度センサー)
- 小型・軽量: 24 x 24 x 10 mm3, 10g
2. 総線量20kradまでのTID耐性を確認(M-G370PDT0モデル)
各ミッションで求められる放射線TIDレベル目安※1
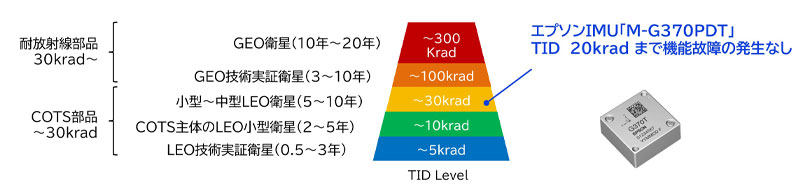
上記の図は、宇宙用途におけるIMUの放射線総線量(TID)耐性レベルの目安を、人工衛星の用途や種類ごとに段階的に示したものです。
人工衛星は、運用期間が長くなり、かつ地球磁場の防護が弱い軌道・深宇宙へ移るほど、累積放射線量が増加するため、より高いTID耐性が求められます。
エプソンIMUの放射線TID試験結果
| 総線量 [rad] | 5k | 10k | 20k |
|---|---|---|---|
| 通電(3pcs) | Pass | Pass | Pass |
| 非通電(1pc) | Pass | Pass | Pass |
本TID試験では、IMU (M-G370PDT0) に総線量を段階的に印加し、各線量で機能およびセンサー特性を評価しました。
その結果、20kradまで通電・非通電ともに機能異常や消費電力の大きな変化は認められず、本IMUは20kradレベルまでのTID環境で機能維持可能であることを確認しました。
詳細は下記を参照ください。
G370PDT0における放射線トータル・ドーズ効果の影響(PDF,4.5MB)
※1 当社調べによる
本サイトに記載したTIDレベルは、一般に広く用いられている宇宙環境モデルおよび評価手法を参考とし、複数の前提条件を置いた上で整理した参考目安です。
これらの目安値は、特定ミッションや運用年数での動作を保証するものではなく、実際の必要耐性は、遮蔽構造・太陽活動・軌道条件等により大きく変動します。
【用語説明】
ARW: Angle Random Walk
TID: Total Ionizing Dose
COTS: Commercial Of-The-Shelf
LEO: Low Earth Orbit
GEO: Geostationary Earth Orbit
TIDの単位である"rad"(ラド)は、放射線による吸収線量を表す単位であり、物質の単位質量あたりに吸収されたエネルギー量を示します。国際単位系(SI)では、吸収線量の単位として、"Gy"(グレイ)が用いられ、両者の関係は以下の通りです。
1rad=0.01J/kg = 0.01Gy
記載しているTID値は、シリコン(Si)中での吸収線量に換算された値を示しています。
※共通注記
- 本製品は宇宙用途向けに設計されたものではありません。TID試験結果は耐放射線性能の実力を把握するための参考データであり、宇宙用途における性能を保証するものではありません。
- TID試験では、同一製造ロットのIMUを試験対象としましたが、内蔵されている部品のロット管理はされておりません。内蔵部品はロットばらつきがある点を考慮の上、ご参考ください。
- 本レポートのTID試験結果はrad単位で表記しております。(1 rad= 0.01 Gy)
- 本レポートのすべてのTID試験結果は、シリコンの放射線吸収線量に変換された値です。
採用事例
JAXA、ISS内のカメラロボットInt-Ball2に弊社のIMUが採用
国際宇宙ステーション(ISS)「きぼう」日本実験棟で稼働中の自律移動型船内カメラ『Int-Ball2』は、宇宙飛行士に代わって船内を移動し、写真や動画の撮影を地上から遠隔で行うロボットです。 無重力空間では3次元移動(X/Y/Z)に加えて回転姿勢(ロール/ピッチ/ヨー)も同時に制御する必要があるため、高精度な姿勢検出が欠かせません。
エプソンのIMU「M-G370シリーズ」は、小型・軽量・低消費電力でありながら高精度である点が評価され、Int-Ball2に採用されています。
Int-Ball2の姿勢制御を支えるエプソンIMUの3つのポイント
- 低ノイズ性能:水晶を用いたセンサー技術により、姿勢制御に重要な低ノイズ性能を有し無重力環境下での安定した自律飛行に貢献しています。
- 小型・軽量:24mm×24mm、10gのコンパクト設計が、Int-Ball2筐体内部の省スペース化に貢献しています。
- 低消費:長時間の稼働に求められる低消費電力化に貢献しています。



詳しくは下記のニュースリリースを参照ください。
エプソンのIMUが、JAXA国際宇宙ステーション「きぼう」日本実験棟の自律移動型船内カメラ『Int-Ball2』に採用され稼働中
推奨センサー
人工衛星・宇宙機器用途での使用に推奨できる製品をご紹介します。
さらに詳しい情報をご希望の方は、お気軽にお問い合わせください。
| ITAR FREE |
機種 | 特長 | ブリーフシート | サイズ [mm] |
重量 [g] |
ジャイロセンサー | 加速度センサー | 軸間アライ メント精度 [°] |
インターフェイス | 動作温度 範囲 [℃] |
消費電流 [mA] |
電源電圧 [V] |
|||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 検出範囲 [°/s] |
バイアス安定性 [°/h] |
ARW [°/√h] |
検出範囲 [G] |
バイアス安定性 [µG] |
|||||||||||
| ✔ | M-G370PDT | プレミアムモデル |  24×24×10 |
10 | ±200 | 0.8 | 0.03 | ±8,16*1 | 24 | 0.01 | SPI/UART | -40~+85 | 16@3.3V | 3.3 | |
| ✔ | M-G570PR2 | ハイエンドモデル |  65×65×30 |
150 | ±475 | 0.5 | 0.04 | ±15 | 14 | 0.15 | RS422 | -30~+70 | 80@12V | 9~24 | |
*1 同一モデルにおいて、設定変更で切り替え可能です。
お問い合わせ
製品を購入・検討したい方、資料をご希望の方はフォームからお問い合わせください。



